Top Story

Latest News

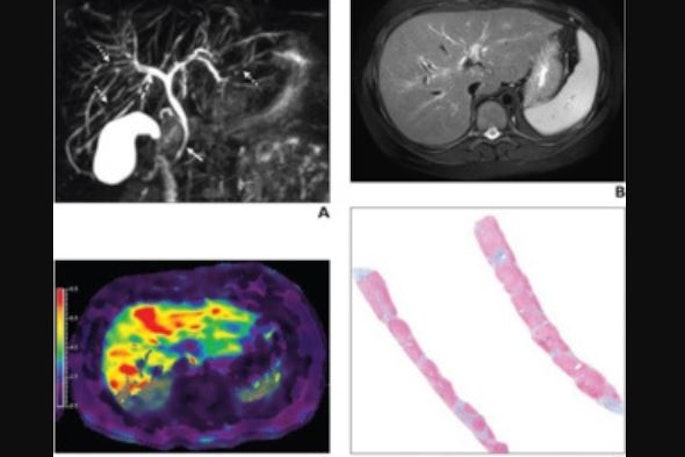
PET/MRI reveals sex differences in patients with autism
April 18, 2024

Sponsored
We care about what you think.
October 30, 2023


Cases of the Week
Check out our Cases of the Week!




More from AuntMinnie
Evergreen Theragnostics raises $26M
April 19, 2024

Segmed partners with Beacon Health System in Indiana
April 19, 2024


Accuray opens training facility in Switzerland
April 18, 2024

Lumicell's Lumisight, LumiSytem get FDA nods
April 18, 2024

Radiology Leadership Institute names award recipients
April 18, 2024

GE HealthCare launches two new ultrasound systems
April 18, 2024
AdvaMed urges Congress prioritize R&D tax credit
April 17, 2024


Swoop system tested in Alzheimer’s patients
April 17, 2024

PET tracer for gliomas under expedited review
April 17, 2024
